Participating in EU Robotics Week!
November 28th, 2011
GuarddoG ( and me ;P ) will be participating in the EU Robotics Week with an event at the Athens Univeristy of Economics and Business in the D21 room 15:00-19:00 in 2 December 2011 .
There will be 3 projects presented there ( guarddog is one of them ) and everybody is welcome .. ! ![]()
European Robotics Week: 28th of November – 4th of December 2011
Over 350 robotics related events throughout Europe with more than 130 participating organisations from 19 European countries
The European Robotics Week offers one week of various robotics related activities across Europe for the general public, highlighting growing importance of robotics in a wide variety of application areas. The Week aims at inspiring technology education in students of all ages to pursue careers in STEM-related fields, i.e. science, technology, engineering and math.
There is a lot going on in Europe during the European Robotics Week: school visits with lectures on robotics, guided tours for pupils, open labs, exhibitions, challenges, robots in action on public squares…. The participating companies, universities and research centres have come up with interesting programs to bring their robots and organisations to the attention of the public educating them on how robotics impacts society, both now and in the future.
Logo euRobotics weekThe idea received overwhelming support of the European robotics community as the amount of events show. Throughout Europe, more than 130 research institutes, robot manufacturers, universities organise events reaching out to the general public within this week.
It’s time to show the general public what robotics is all about and what important role robots already play in Europe!
OrganisationEvents are organised locally (by scientists, labs, teachers, schools, robotics engineers, robot makers etc.), but centrally listed and co-promoted. The euRobotics Coordination Action (in particular EUnited Robotics) is acting as the central coordinator. They are supported through national coordinators who are promoting the idea among their national networks and communities.
Skipping frames to improve cpu usage / power consumption
November 23rd, 2011

I Just added a frame processing skipper for when there are no changes on the frames (after a very quick check implemented here ) and therefore computation of faces , corners , RANSAC tracking and depth mapping has no meaning ( because the image remains almost 99% the same )
I will have to add some cooldowns ( i.e. 1 mandatory recalculation after 2000 milliseconds of skipping )
In the graph you can visually see when the skipping occurs and when normal processing takes place.. ![]()
This Behaviour is switched with VisCortx_SetSetting(USE_MOVEMENT_FLOW_FOR_CALCULATION_SKIPPING,1 or 0 ![]() )
)
github commit : https://github.com/AmmarkoV/RoboVision/commit/cb69d0453e215a8766cfd840109fbfbfeffc7158
New video demonstrating Lucas Kanade Optical Flow tracking and Disparity Mapping !
November 23rd, 2011Linux Inside Magazine Interview : )
November 22nd, 2011
An interview about GuarddoG has just been published in the Greek magazine Linux Inside , issue 6 , the interview doesn’t get into much detail , but it is very nice to see my work in one of the few Greek magazines I read ![]()
Adding Performance Statistics to GuarddoG
November 21st, 2011As I begin to fully document the GuarddoG Project ( a git updated draft under heavy development can be found here ) I also have to document and compare performance results so that they can give a clearer image of what it does and be used in context with other algorithms and projects. ![]()
GnuPlot is an absolutely fantastic tool for this job and with it GuarddoG can now produce ( by itself ;P ) plots of its performance that are automatically converted to images and auto updated on git ![]()


Fixed some cabling issues
November 14th, 2011I just fixed ( it was about time ) some cabling issues , and temporarily removed the breadboard that does the battery/transformer/charger switching that prevented guarddog from booting successfully at its public appearance in AUEB today



Finally a proper lasercut plexiglass stereo rig !
November 14th, 2011

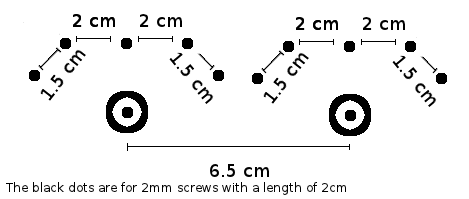
As the final body of guarddog is beginning to take shape I got the new guarddog “eyebrow” that is the mounting point for the two PS3 eye cameras ..
As said in an older post the “schematics” for the laser holes are theese , with all the distances beeing distances between the center of each hole.
 /p>
/p>
Once again thank you Antonis ![]()